ABLE (automatic baggage loading equipment) is a robotic system which loads passenger baggage into containers at airports. Whilst this task is still predominantly performed by men in most airports around the world, ABLE was the first automated system to replace humans with robots at Amsterdam Schiphol, Frankfurt Fraport and London Heathrow.
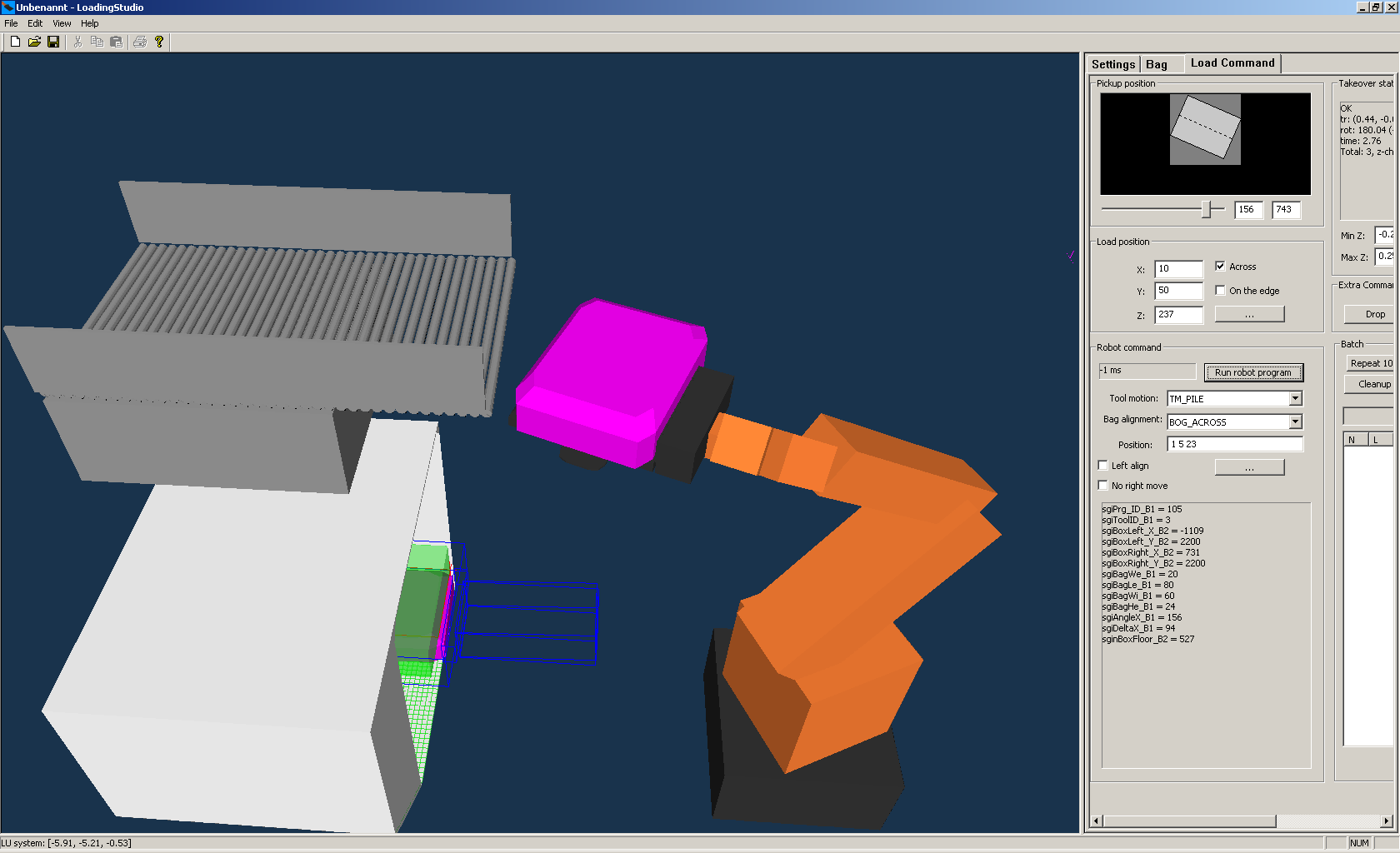
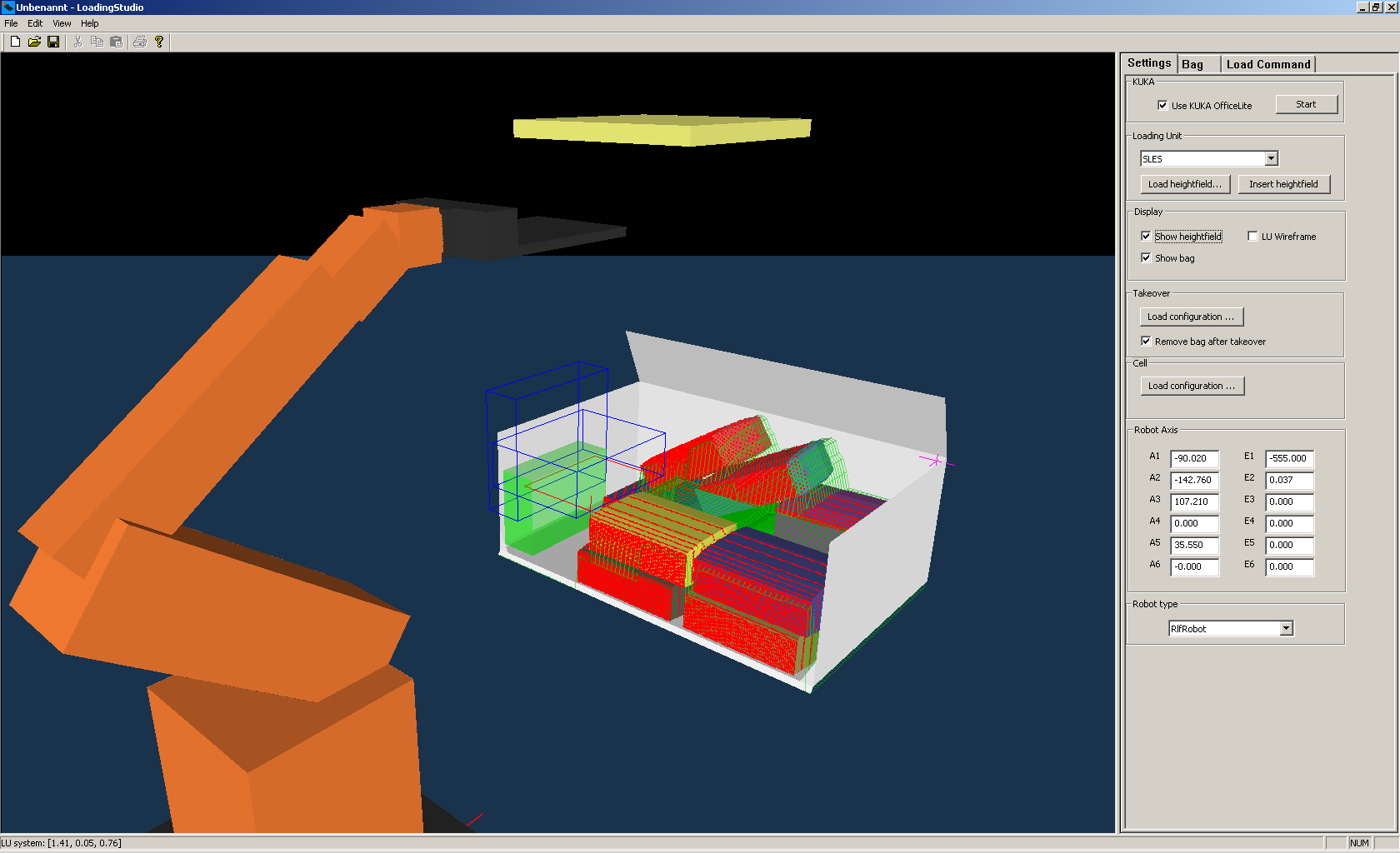
The main challenge was to place each arriving bag into an optimal position in the baggage container, to ensure maximum filling. We achieved this with a 3D vision system which detects the baggage geometry and algorithms which define the best suitable position in the container, selecting and parametrizing robot movements to execute precise placement in the desired position.
The system comprises multiple software components – 3D volume scanners, loading sequence calculator, robotic software. To minimize the time-consuming exercise of testing the algorithms and robot movements on the real system, we also created a physics-based simulation and performance optimization tool.