Metal scrap needs to be sorted by material, shape and size before it can be recycled. As part of a resource efficiency improvement project, our client wanted to move away from the strenuous manual sorting. The government-funded project needed to automate and speed up the sorting process by using robots to separate the metal. However, the robot could not be programmed through conventional methods due to a great variation in the shapes and sizes of the metal pieces.
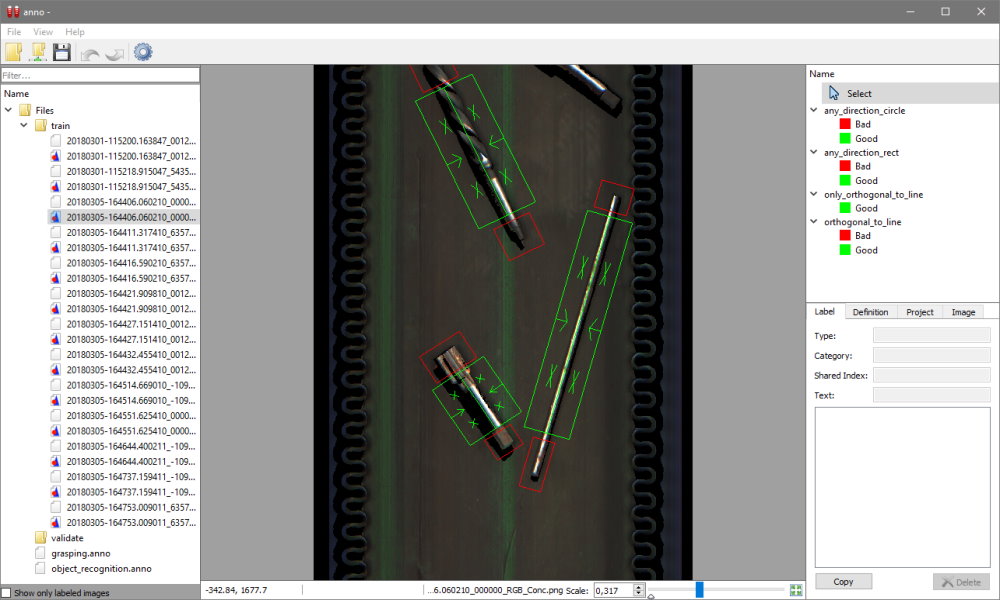
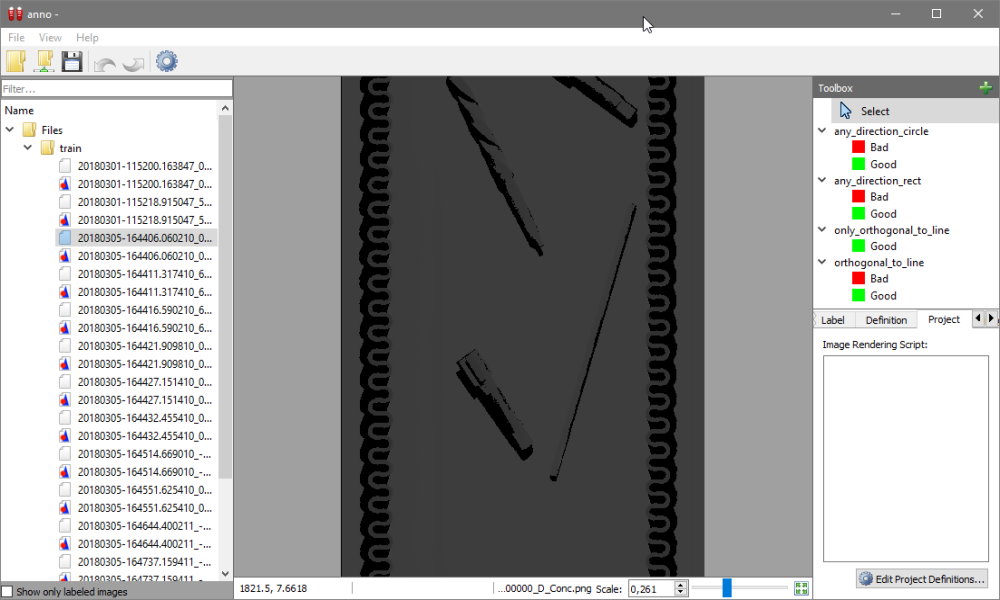
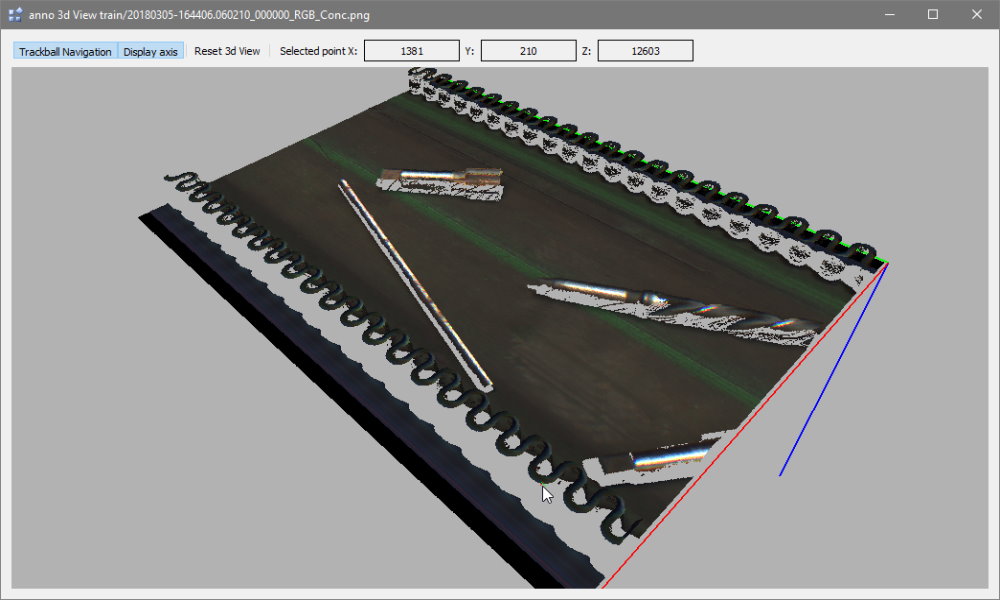
We trained multiple neural networks created in our vision product Aurora on 3D camera images labelled by our dataset tool Anno. The neural network finds and identifies metal pieces on the conveyor belt and computes the appropriate grasping position for the robot, allowing the robot to separate the pieces into the required categories.