Metallschrott muss nach Material, Form und Größe sortiert werden, bevor er recycelt werden kann. Im Rahmen eines Projekts zur Verbesserung der Ressourceneffizienz wollte unser Kunde die anstrengende manuelle Sortierung ersetzen. Ein von der Regierung finanziertes Projekt sollte den Sortierprozess durch den Einsatz von Robotern zur Trennung des Metalls automatisieren und beschleunigen. Die Roboter konnten jedoch aufgrund der großen Unterschiede in Form und Größe der Metallteile nicht mit herkömmlichen Methoden programmiert werden.
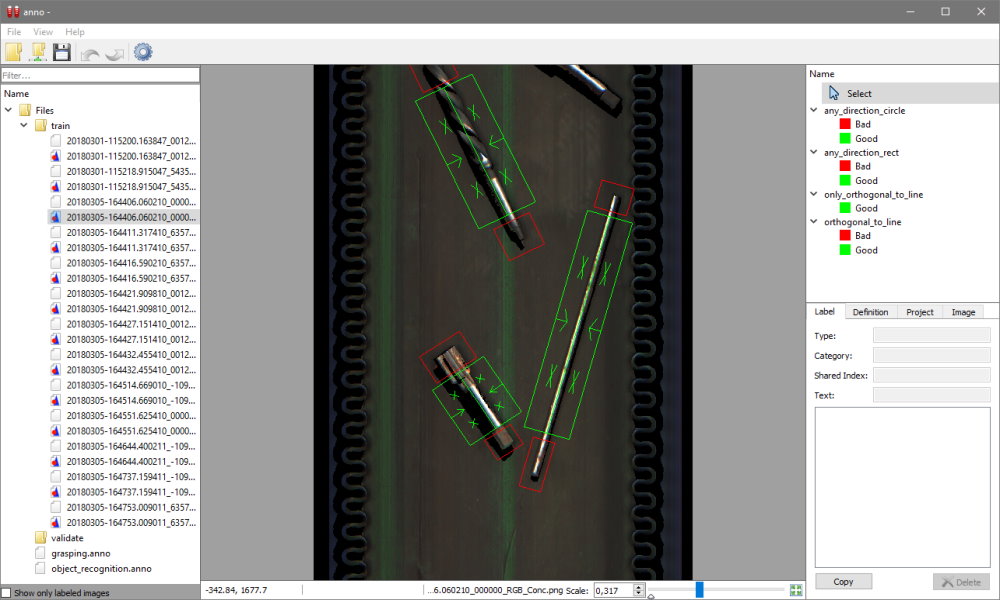
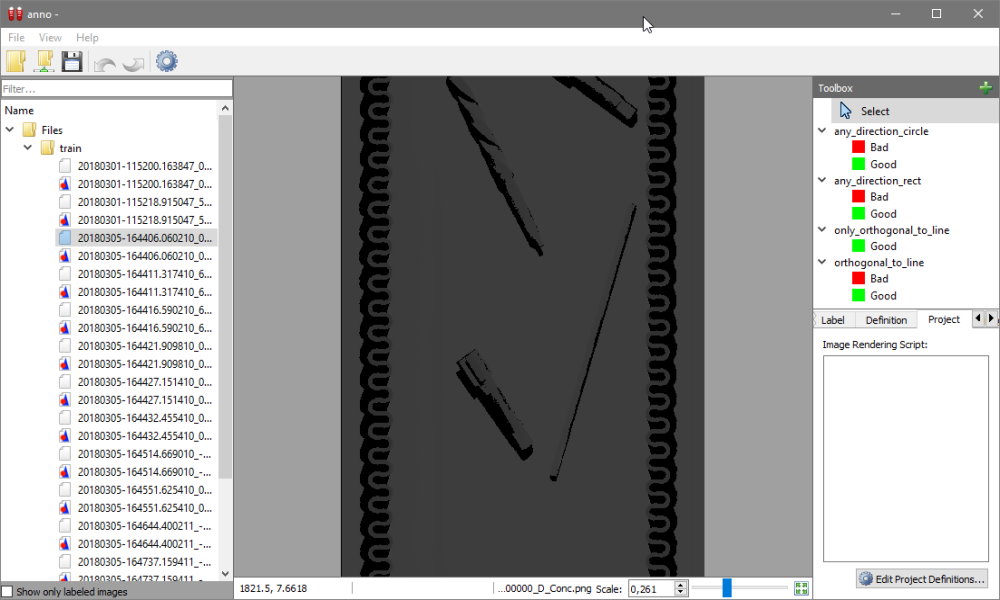
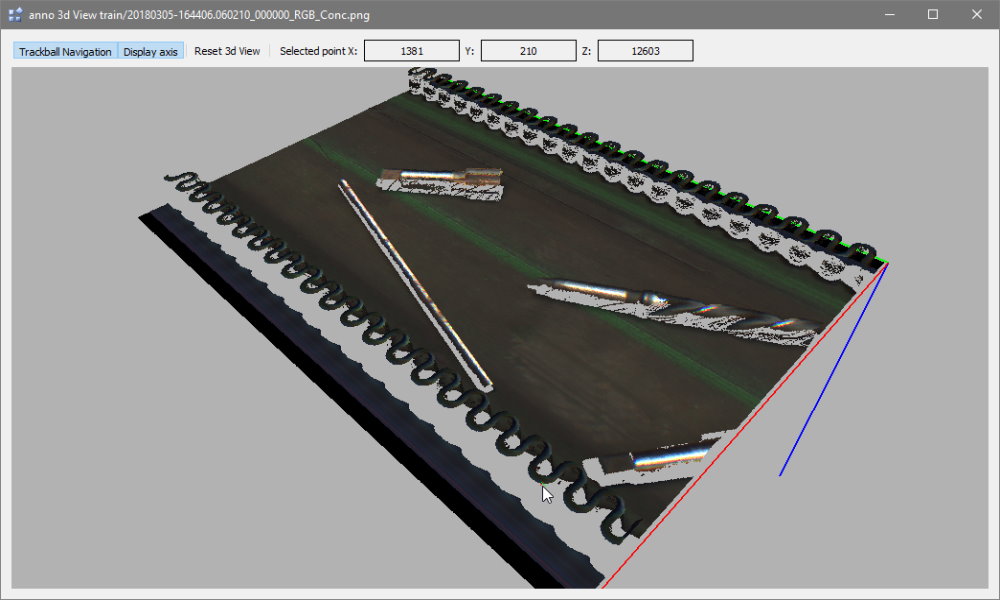
Für die Sortierung des Metallschrotts trainierten wir mehrere neuronale Netze mit Hilfe von 3D-Kamerabilder. Die Netze wurden in unserem Vision-Produkt Aurora erstellt und die 3D Bilder dafür mit unserem Datensatzwerkzeug Anno gelabelt. Dem neuronalen Netz gelingt es die Metallteile auf dem Förderband zu identifizieren und die geeignete Greifposition für den Roboter zu berechnen, so dass der Roboter die Teile in die erforderlichen Kategorien trennen kann.